|
I am currently a Software Engineer at Waymo (formerly Google's self-driving car project), working on localization and building high-quality map for autonomous vehicles. I hold a Ph.D. from University of Michigan, Ann Arbor in Electrical and Computer Engineering. I was a part of the UM & Ford Center for Autonomous Vehicles (FCAV), where I was advised by Prof. Matthew Johnson-Roberson and Prof. Ram Vasudevan. During my Ph.D., I worked on 3D computer vision. Prior to joining UM, I obtained my BS from Tianjin University and worked with Prof. Sen Wu on atomic force microscopy. Email / Google Scholar / Github / Linkedin |

|
|
I'm interested in understanding the 3D environment using techniques from computer vision and machine learning. |
|
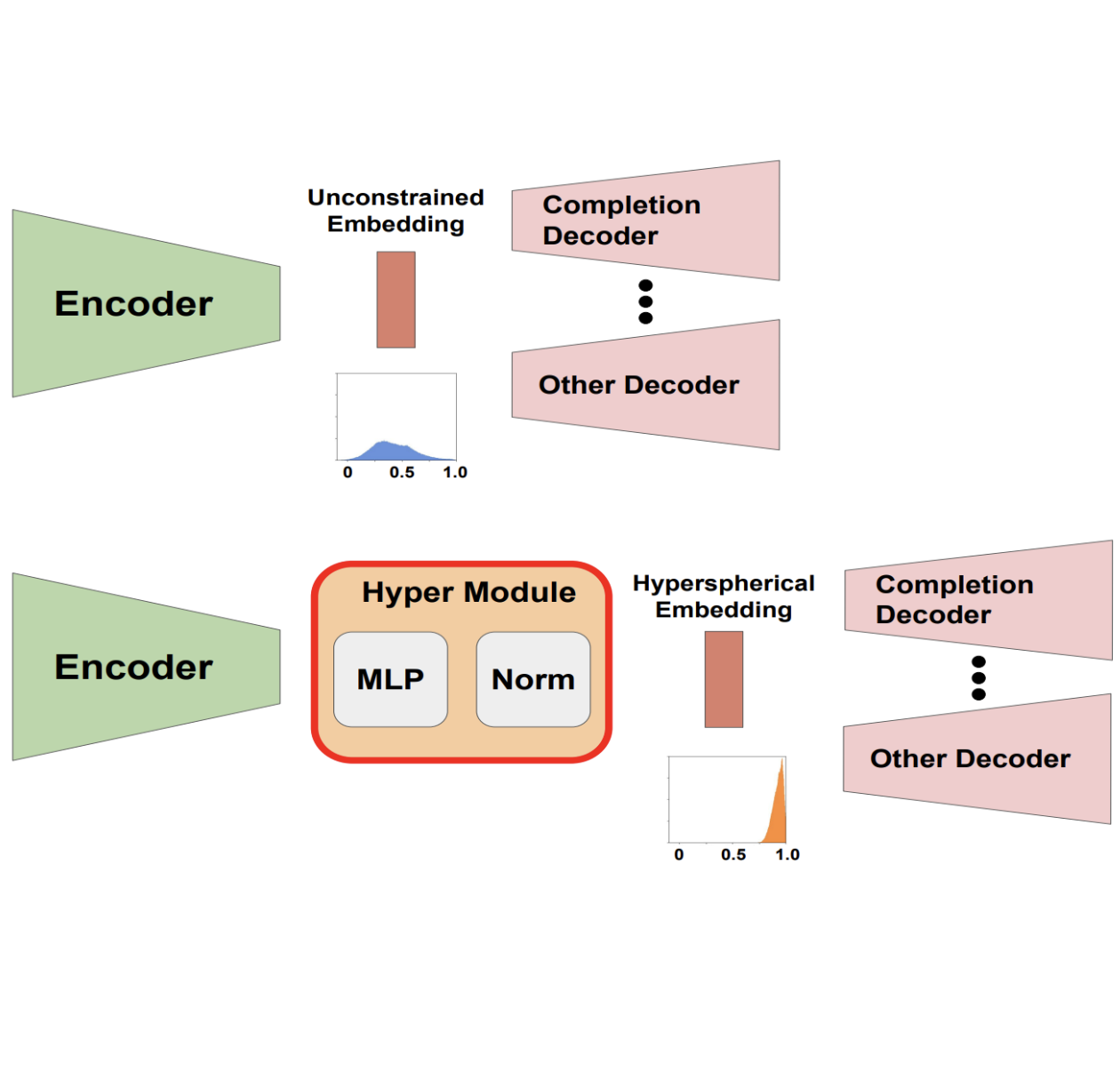
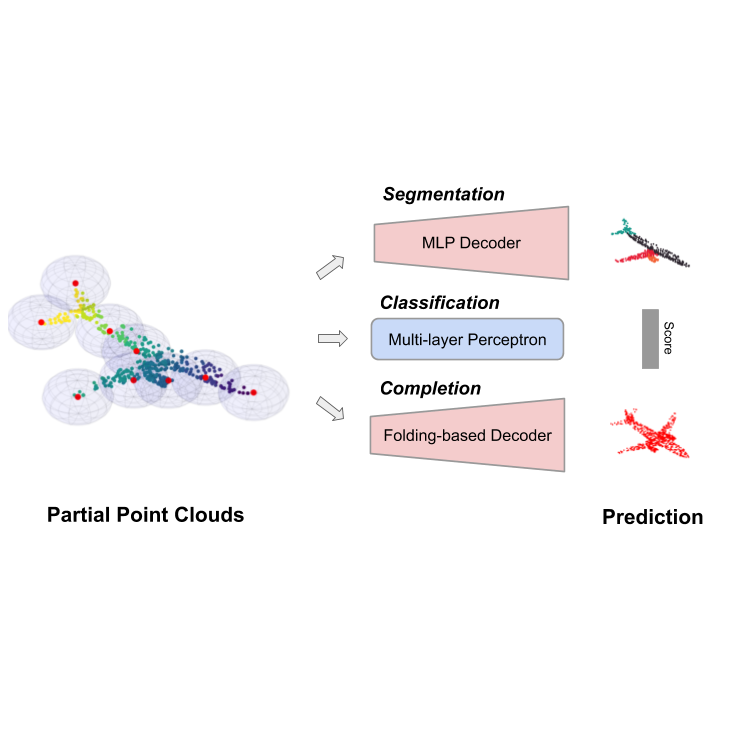
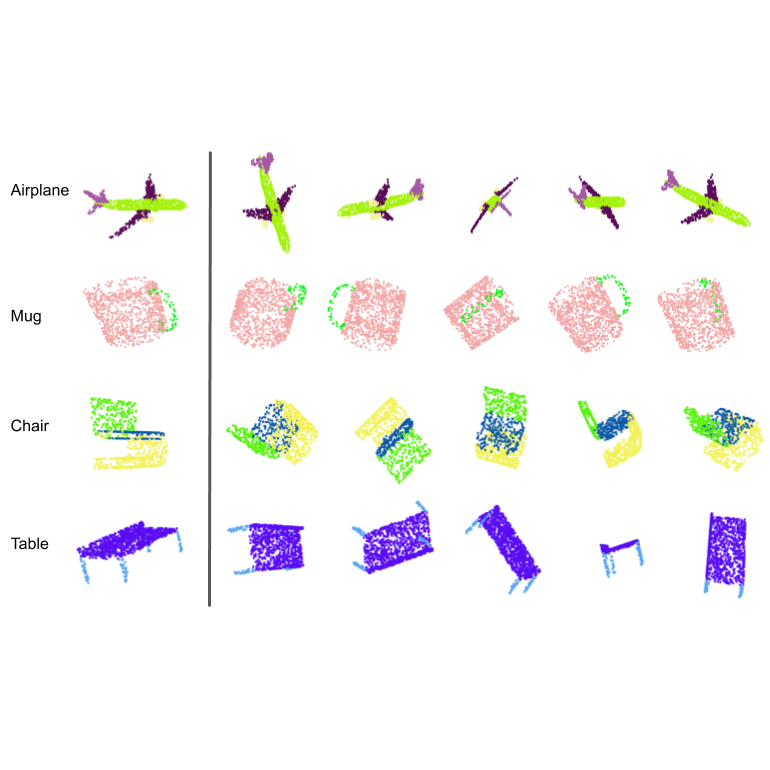
Junming Zhang, Haomeng Zhang, Ram Vasudevan, Matthew Johnson-Roberson Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023 project / paper / code |
|
Junming Zhang, Weijia Chen, Yuping Wang, Ram Vasudevan, Matthew Johnson-Roberson IEEE Robotics and Automation Letters, 2021 paper / suppl / code |
|
Junming Zhang, Ming-Yuan Yu, Ram Vasudevan, Matthew Johnson-Roberson 3D Vision Conference, 2020 (Oral) paper / suppl |

|
Junming Zhang, Manikandasriram Srinivasan Ramanagopal, Ram Vasudevan, Matthew Johnson-Roberson IEEE International Conference on Robotics and Automation (ICRA), 2020 paper / suppl |
|
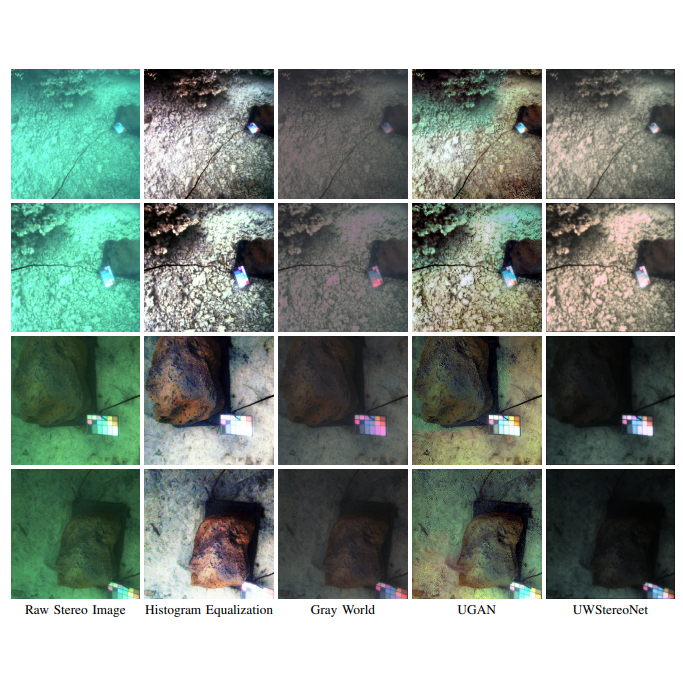
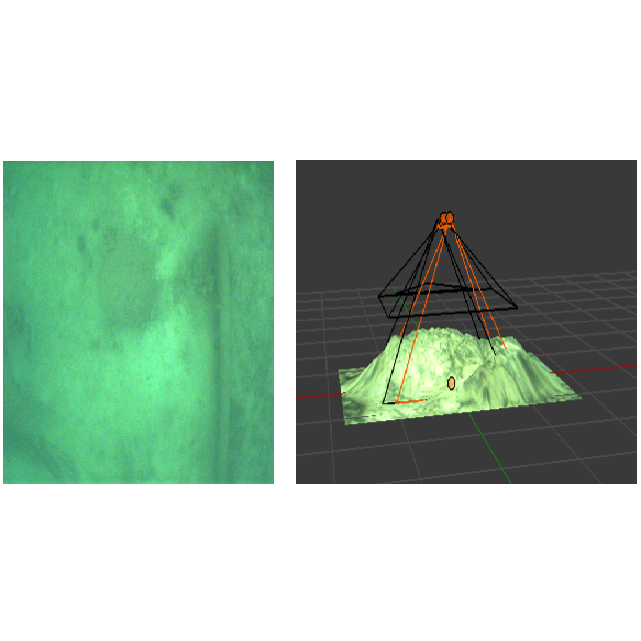
Katherine A Skinner, Junming Zhang, Ram Vasudevan, Matthew Johnson-Roberson International Conference on Robotics and Automation (ICRA), 2019 paper / code |

|
Junming Zhang, Katherine A Skinner, Ram Vasudevan, Matthew Johnson-Roberson IEEE Robotics and Automation Letters, 2019 paper / code |
|
Elizabeth A Olson, Corina Barbalata, Junming Zhang, Katherine A Skinner, Matthew Johnson-Roberson OCEANS 2018 MTS/IEEE Charleston, 2018 paper |
|
|
|
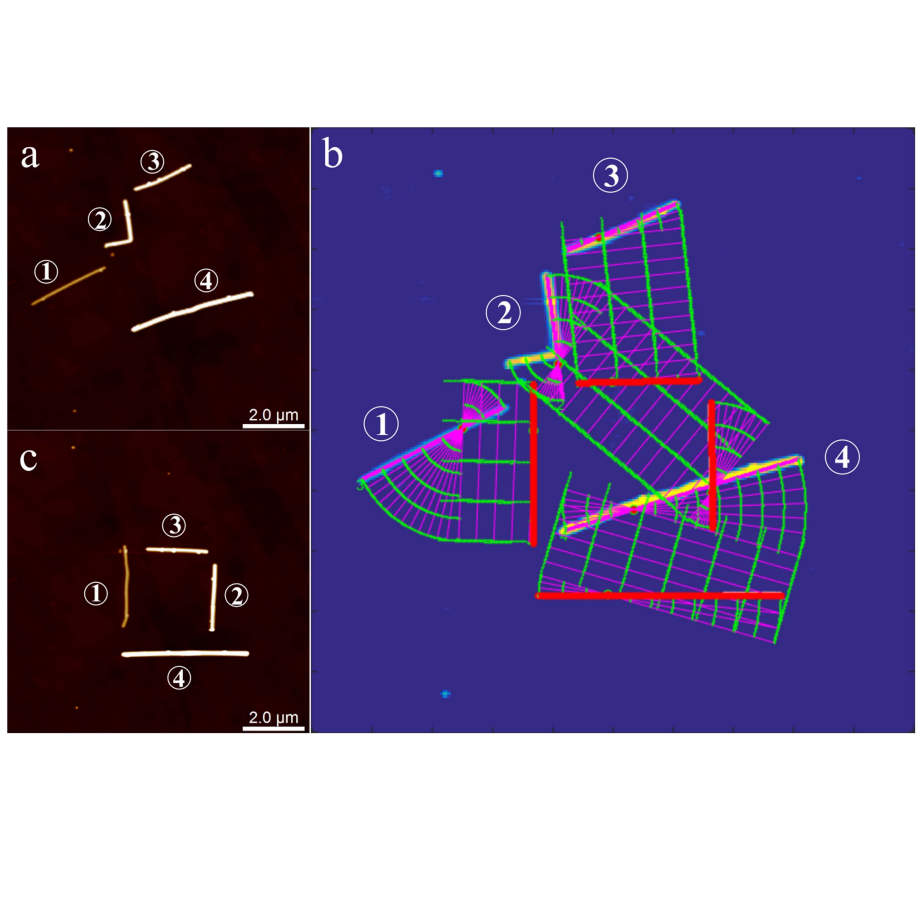
Hongzhi Liu, Sen Wu, Junming Zhang, Huitian Bai, Fan Jin, Hai Pang, Xiaodong Hu Nanotechnology, 2017 paper |
|
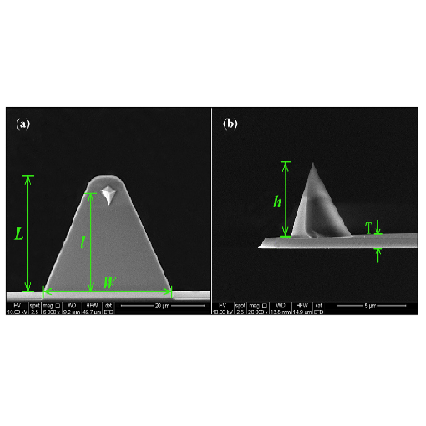
Yunpeng Song, Sen Wu, Linyan Xu, Junming Zhang, Dante J Dornates-Gonzalez, Xing Fu, Xiaodong Hu Measurement Science and Technology, 2015 paper |
|
Thanks for the template opened by Jon Barron |